六轴工业机器人有多少个自由度?个数是什么?
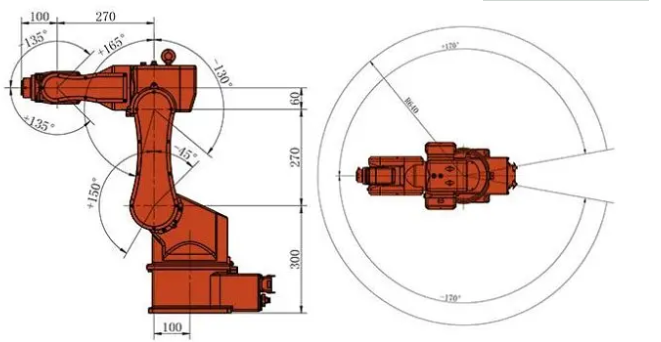
的有关信息介绍如下:六轴工业机器人一般有6个自由度,常见的六轴工业机器人包含旋转(S轴),下臂(L轴)、上臂(U轴)、手腕旋转(R轴)、手腕摆动(B轴)和手腕回转(T轴)。6个关节合成实现末端的6自由度动作。
6轴工业机器人的全部控制由一台微型计算机完成,另一种是分散式控制,即采用多台微机来分担机器人的控制,如当采用上、下两级微机共同完成机器人的控制时。主机常用于负责系统的管理、通讯、运动学和动力学计算,并向下级微机发送指令信息;作为下级从机,各关节分别对应一个CPU,进行插补运算和伺服控制处理,实现给定的运动,并向主机反馈信息。根据作业任务要求的不同,机器人的控制方式又可分为点位控制、连续轨迹控制和力控制。
扩展资料:
六轴工业机器人采用双臂结构,适用于高速3C作业,宽广的工作空间与强大的负载能力,拥有1000mm宽广的动作范围;六轴工业机器人额定承载能力为4KG。
6轴工业机器人很大的特点是柔性启动化,柔性制造系统中的一个重要组成部分。工业机器人可随其工作环境变化以及加工件的变化进行再编程,适合于小批量多品种具有均衡高效率的柔性制造生产线的应用。
6轴工业机器人结合机器人与人的特点。在6轴工业机器人的结构上有类似人的行走、腰转、大臂、小臂、手腕、手爪等部分,在控制上有电脑。其传感器提高了工业机器人对周围环境的自适应能力。
版权声明:文章由 百问家 整理收集,来源于互联网或者用户投稿,如有侵权,请联系我们,我们会立即处理。如转载请保留本文链接:https://www.baiwenjia.com/answer/160767.html